

專題成果
自動煎蛋機器人
本專題所設計開發的自動煎蛋機器人,可以利用大家一早忙碌梳妝準備上班的時間,全自動化完成煎蛋的料理工作,在出門前只要將自動煎好的熱騰騰荷包蛋夾起吐司,即可完成營養早餐的準備工作,從容開始美好的一天。本專題利用步進馬達、加熱片及Arduino控制板,完成自動煎蛋機器人的機構設計、實體製作與控制程式的撰寫。將進蛋、噴油、打蛋、撥蛋、退殼、加熱、翻面、二次噴油及加熱等程序以機電整合的方式實現,自動煎蛋機器人是一台能進入每個家庭廚房的自動化料理小家電,可連續自動化完成多個荷包蛋的料理工作,該設計目前已獲得美國及中華民國發明專利,並已將相關技術移轉給廠商,因此具有相當大的發展潛力。
Achievements
1. 中華明國發明專利:I648005 ; 美國發明專利:US10,702,089 B2
2. 全球傳動智能自動化創意實作競賽---亞軍;
3. 全球傳動智能自動化創意實作競賽---最佳創投獎
4. 全球傳動智能自動化創意實作競賽---創新獎
5. 全球傳動智能自動化創意實作競賽---最佳人氣
6. 教育部全國技專校院實務專題製作競賽---亞軍
7. 技術移轉:鉅秀有限公司

輪型彈跳機器人
本專題在分析現有彈跳機器人的基礎下,設計一種新穎的跳躍機構,能實現行程分配、單向驅動及能量的鎖定與釋放,具有結構緊實及低馬達轉矩等優點。本專題成功整合了無線通訊及馬達運動控制,使機器人同時具有輪式移動與彈跳運動的功能,可實現輪型移動與彈跳越障等任務。本專題的重點放在彈跳機構的設計與實現上,跳躍機器人相對於自主式移動機器人具有體積小、構造簡單、控制容易、躍障能力強及應用範圍廣等特點。由於本專題所設計之機器人既能跳躍又能以輪式移動方式行走,使其能夠在惡劣的環境下工作;小型輕量化在狹窄空間的移動性較強,因具備遠端遙控及影像監視之功能,因此可以增加該機器人的使用範圍。目前該設計已獲得美國發明專利,並已將相關成果技轉給廠商,具有相當大的發展潛力。
Achievements
1. 中華明國發明專利:I66969 ; 美國發明專利:US10,058,999 B2
2. 教育部全國技專校院實務專題製作競賽---亞軍
3. 獲科技部大專生專題計畫補助
4. 中興大學機械系專題製作競賽---第二名
5. 技術移轉:達文西創新有限公司、全球傳動科技股份有限公司
履帶機器人
救災偵查機器人結合視覺影像辨識、雷射測距儀掃描地、巡邏路徑規劃、有害氣體感測器、超音波感測器以及可遠端操控監控等技術,製作可跨越多障礙地形及爬階梯的機器人,該設計以降低災害發生後因救援可能造成的二次傷害機率及有效提升救災人員工作效率為目的。機器人前後擺臂為履帶結構且左右對稱。當空間狹小時,前後擺臂可以摺疊起來。救災偵查機器人採用無線遙控的操作模式�,在崎嶇地面工作時的適應性與穩定性良好。

Achievements
-
中興大學機械設計與製作專題競賽 – 第一名 獎金18萬

腳踝復健機器人

傳統腳踝復健訓練系統以馬達帶動關節運動,其柔順性與安全性較差。本研 究以改善馬達驅動之腳踝復健訓練系統柔順性差的缺點為目標,結合史都華平台 和氣動致動器,利用運動學設計六種常見的腳踝復健軌跡,並且利用氣動電磁閥 和氣壓缸的搭配達到致動器的功能,控制方面則使用 myRIO 嵌入式控制,且利 用 LabVIEW 設計良好的人機介面,開發一種兼具安全與柔順的六自由度『氣動 式腳踝復健訓練系統』。
Achievements
1. 全球傳動智能自動化創意實作競賽---佳作
2. 獲科技部大專生專題計畫補助
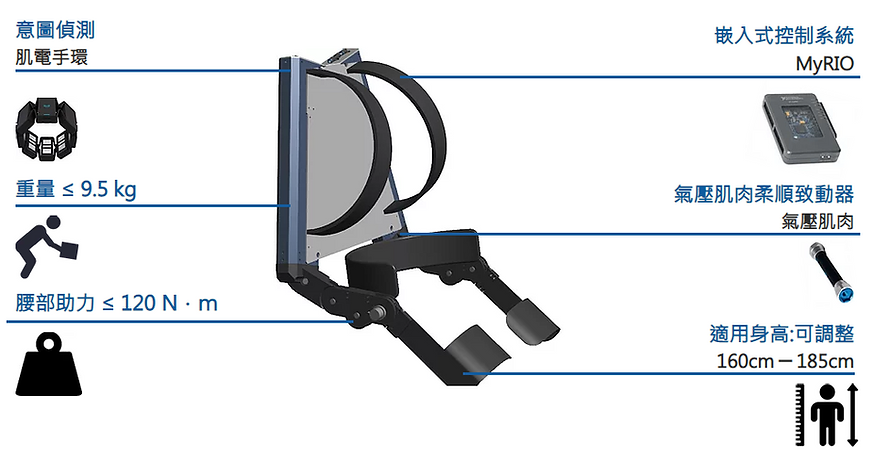
可穿戴動力輔助腰部外骨骼
現代化的汽車生產線大部分都已實現自動化,但是部分工作的人力依舊不可或缺,以組裝搬運的操作為例,工作人員需搬運約5-6公斤重的零件模組,每天重複約3000-4000次,常年單一動作與重力壓迫容易引起腰部的職業傷害,進而影響工作的效率。為滿足工業領域從業人員的使用習慣,柔性腰部助力外骨骼將其重量控制在10公斤以內,可以減輕穿戴者的負擔。腰部外骨骼系統透過氣壓肌肉驅動可增強腰部力量,提供人在搬運時彎腰起身最大120 Nm的助力。柔性腰部助力外骨骼採用人體工學設計,適用各種不同工作場域需求,可增強穿戴者的搬運持久力,並可減輕腰部疲勞及預防職業傷害。

Achievements
-
中興大學機械設計與製作專題競賽 – 第二名
-
獲科技部大專生專題計畫補助
氣動式可穿戴上肢外骨骼助力系統
有鑑於鑄造廠淋模 作業 員因長時間手持一定重量及長度的長管進行作業,導致手肘及肩頸患有職業傷害 。本專題的 設計 作品 旨在利用 氣壓肌肉致動器安全柔順且低成本的特點 ,並透過肌電手環 遙控使肩肘關節上升下降,調整至穿戴者需要的角度。 希望透過作品打造一個勞工安心、老闆開心的工作環境。


Achievements
-
中華民國發明專利: I584801; 美國發明專利: US 10,420,695 B2; 中國發明專利: ZL 2017 1 0240416.4; 中華民國發明專利I 815659
-
技術轉移: 華亨科技股份有限公司
-
科技部大專學生研究創作獎
-
中興大學機械設計與製作專題競賽 – 第一名
-
勞動部百萬創客擂台賽-晉級全國總決賽-全國前12強
-
獲科技部大專生專題計畫補助
可變形移動載具設計與遙自主導航控制
本專題結合輪式和履帶式的優點,讓機器人因應不同的地形。目前有三種變形模式,分別為全履帶模式、類四輪模式和渡水模式。本專題加入遙自主導航控制功能,讓機器人在遙控訊號斷線時能自動返回可接收遙控訊號的位置。
Achievements
-
全球傳動智能自動化創意實作競賽---佳作
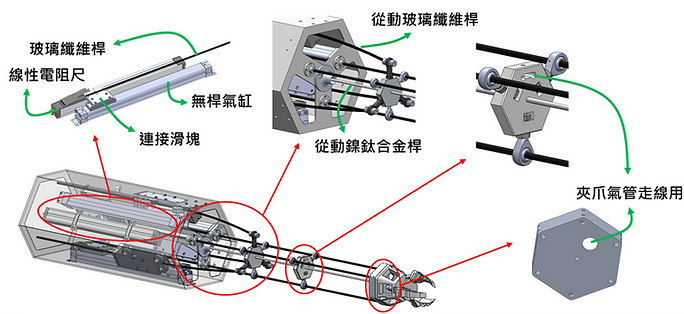
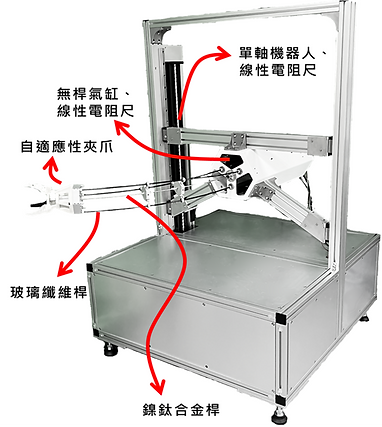
具自適應性夾爪之仿生連續體機械手臂
本專題以設計及實現「具自適應性夾爪之仿生連續體機械手臂」為目的,旨在改善傳統串聯式或並聯式的剛性機械手臂其結構複雜、重量過重及製造成本高的缺點,連續體機械手臂具有可以大幅度彎曲、扭轉和伸縮的優勢,其作動方式類似於象鼻及章魚觸手等不具關節的生物器官,藉由拉伸彈簧、氣囊或鋼絲等彈性材料,使手臂呈現出如生物的柔性及靈活性,以水果採摘為例,有別於傳統機械手臂,其柔順且多方向的運動特性可避開植物枝條,在不損害植物的情況下採摘。本專題除了設計前述之連續體機械手臂外,為進一步擴展其應用領域,將在前述連續體機械手臂的基礎上,研製具備自適應功能之柔性夾爪,以實現形狀複雜物件之隨形抓取目的,除了嘗試改善傳統剛性機械手臂重量重、成本昂貴以及機械式夾爪適應能力較差等問題,更是驗證這兩個仿生概念的可行性,為廠商提供後續研發之方向。首先將針對連續體機械手臂及自適應夾爪之設計與控制加以探討,並根據國內外有關連續體機械手臂及自適應性夾爪之發展現況與應用成果,以仿生及低成本之氣動伺服技術為核心,提出「具自適應性夾爪之仿生連續體機械手臂」的整體設計方案,主要工作包括:機構設計、氣動伺服與嵌入式控制系統開發;其次,將依據設計方案進行整體機構的研製,且將以嵌入式系統搭配LabVIEW圖控軟體撰寫訊號擷取與運動控制程式;最後則將藉由實驗方式進行連續體機械手臂末端點之軌跡追蹤及自適應夾爪隨形夾取的功能驗證。

Achievements
-
中興大學機械設計與製作專題競賽 – 第一名 獎金18萬
-
大專校院機電暨智慧創意實作競賽 – 季軍 獎金10萬
-
第七屆全球傳動智能自動化創意實作競賽 – 冠軍 獎金15萬
https://money.udn.com/money/story/5723/7197454
https://ctee.com.tw/industrynews/cooperation/872515.html
https://www2.nchu.edu.tw/news-detail/id/55644 -
入圍國科會大專生專題創作獎
-
中國機械工程學會全國學術研討會 – 具隨形抓取功能之仿生連續體機械手臂設計與控制
-
獲科技部大專生專題計畫補助
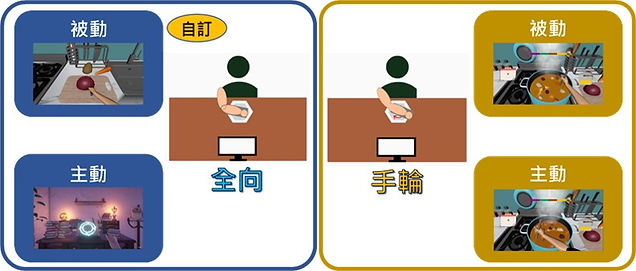
具VR功能之全向移動末端引導式居家小型上肢復健機
鑑於未來復健治療師的供給將不及復建需求,透過機器替代人力協助病患訓練將是復健的趨勢,本專題『具VR 功能之全向移動末端引導式居家小型上肢復健機』旨在研製一款適合居家或中小型復健中心使用,擁有主被動訓練、具備VR遊戲、攜帶方便、操作簡易且安全的上肢復健機,並透過LabVIEW開發程式控制復健機配合訓練模式作動,進而帶動使用者完成肩、肘的屈曲與伸展訓練,並透過Unity 3D開發VR上肢復健遊戲,提高患者的復健意願與專注度。團隊將在一個平面全向移動載具上配置嵌入式控制器、各式感測器與致動器。機構設計部分,採用精簡小巧且安全性高的末端引導式機型,團隊設計一全向移動平台,藉由三角布局法配置全向輪組達成機台小型化,並透過起落機構結合手輪復健機,將多種訓練整合於單一復建機;復健訓練部分,設計具有主被動訓練的兩種模式:手輪旋轉與全向移動,提供患者多樣的選擇,此外,各模式皆有搭載VR遊戲,增加訓練的趣味性,提升患者復健意願及成效;虛實整合部分,會偵測患者訓練情形並同步至遊戲畫面,實現人機互動的功能。團隊會分析機構可靠度、軌跡追蹤精確度和資料傳輸穩定性,以驗證「具 VR 功能之全向移動末端引導式居家小型上肢復健機」設計的合理性。





Achievements
-
中興大學機械設計與製作專題競賽-第三名
-
萬潤創新創意競賽-最佳潛力獎 獎金2萬
-
全國大專院校產學創新實作競賽-佳作獎
-
國立中興大學工學院專題研究成果競賽 -優等獎
-
國立中興大學工學院全英文專題研究成果及論文競賽 -優等獎
-
台灣康寧PBL創新獎(Problem-based Learning, PBL innovation award)-評審團特別獎 獎金2.5萬
-
中華民國發明專利 I 821135
-
運動科技創新競賽-律動醫創-特優創新科技獎 獎金2萬
-
台灣精密工程學會精密工程專題與論文競賽 -佳作 獎金1萬
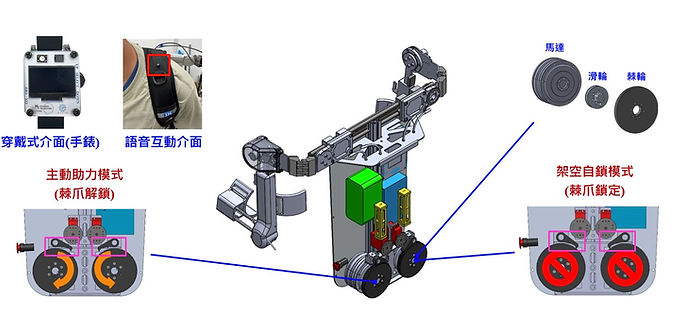
上肢助力外骨骼
本專題以設計及實現「兼具被動支撐與主動助力功能之上肢助力外骨骼」為目的,旨在改善傳統外骨骼系統結構複雜、重量過重及能源效率低的缺點,上肢助力外骨骼具有主動助力與被動支撐雙模式的優勢,其設計方式融合背置串聯彈性驅動器(Series Elastic Actuator, SEA)與創新的棘爪-棘輪自鎖機構,能在提供穩定助力的同時減少系統重量與能耗,進而提升穿戴舒適性與操作靈活性,以工作輔助為例,有別於傳統剛性外骨骼,本系統的柔順與多模式特性可適應各種複雜工作場景,並有效降低使用者的肌肉負擔。本專題除了設計前述之雙模式外骨骼外,為進一步拓展其應用場域,亦開發了結合語音互動與穿戴式手錶的人機介面,提供狀態監控、助力模式切換與緊急停止等功能,旨在提升系統操作便利性與使用者安全性,並驗證外骨骼輔助操作的效能。首先將針對外骨骼系統設計與控制策略進行深入探討,並根據國內外有關被動及主動外骨骼系統之發展現況與應用成果,以非同軸驅動設計與柔性驅動結構為核心,提出「兼具被動支撐與主動助力功能之上肢助力外骨骼」的整體設計方案,主要工作包括:機構設計、嵌入式控制系統開發與人機互動介面設計;其次,將依據設計方案進行整體系統的製作,並以嵌入式系統搭配語音模組及LabVIEW圖控軟體撰寫控制程式;最後則將藉由實驗方式進行上肢助力外骨骼的靜態與動態作業輔助效能測試,驗證系統的助力模式切換、運動意圖辨識與肌肉負擔減輕的功能。


Achievements
-
技術轉移:鑽全實業股份有限公司
-
中華民國發明專利 I 870164
-
獲2023年全國大專院校產學創新實作競賽-第一名 獎金5萬
-
獲台灣康寧PBL創新獎 – 第1名 獎金5萬
-
獲國立中興大學工學院專題研究成果競賽 - 特優 獎金1.5萬
-
隨動順應與隨動助力演算法已移交至中科院野戰型外骨骼使用
-
獲大立光PBL創新獎
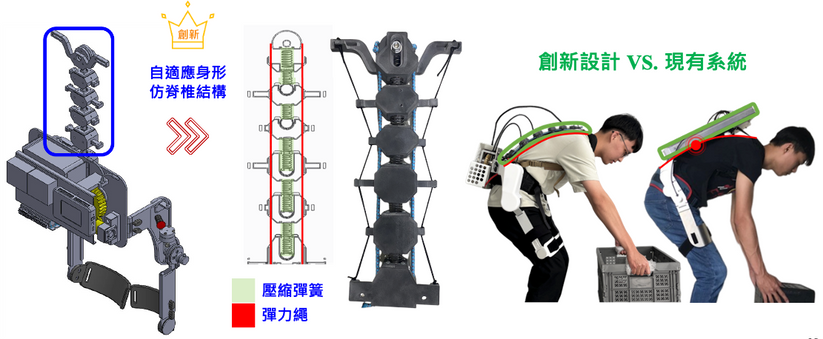
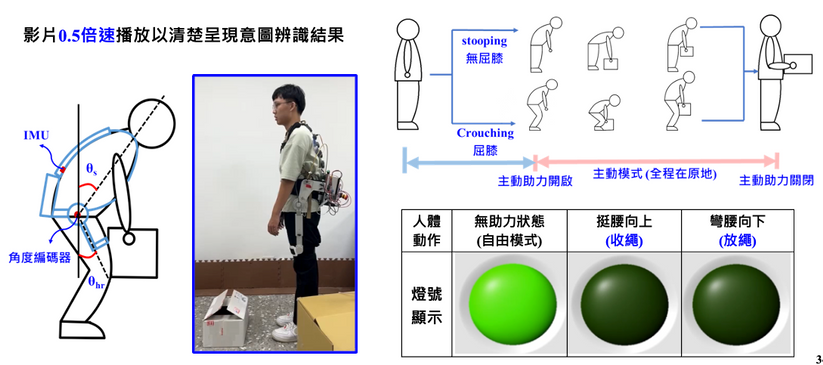
腰部助力外骨骼
本專題以設計及實現「職業用穿戴式主被動腰部助力外骨骼」為目的,旨在改善傳統腰部外骨骼剛性結構導致的舒適性不足、重量過重及適用場景受限等問題。腰部助力外骨骼具有主動助力與被動支撐雙模式的優勢,其設計採用了仿脊椎結構和單馬達驅動雙側助力系統,能在提升腰部活動靈活性的同時減少使用者肌肉負擔,以搬運作業為例,有別於傳統外骨骼,其高適配性與靈活性設計可適應多種工作姿態,有效降低工作者的腰部負荷,減少肌肉骨骼疾病(Musculoskeletal Disorders, MSDs)的風險。本專題除了設計前述之腰部助力外骨骼外,為進一步擴展其應用範圍,亦開發了結合語音交互與穿戴式手錶的多元人機介面,提供狀態監控、助力模式切換及緊急停止等功能,旨在提升系統操作便利性與使用者安全性,並驗證外骨骼輔助作業的效能。首先將針對腰部助力外骨骼的設計與控制策略進行深入探討,並根據國內外有關腰部外骨骼系統之發展現況與應用成果,以仿生與自適應設計為核心,提出「職業用穿戴式主被動腰部助力外骨骼」的整體設計方案,主要工作包括:機構設計、自適應仿脊椎結構開發、嵌入式控制系統設計及多元人機互動介面開發;其次,將依據設計方案進行整體系統的製作,並以嵌入式系統搭配LabVIEW圖控軟體撰寫控制程式;最後則將藉由實驗方式進行腰部助力外骨骼的雙模式輔助效能測試,驗證其在彎腰與抬升作業中的助力切換效果及肌肉負擔減輕功能。

Achievements
-
技術轉移:鑽全實業股份有限公司
-
獲國科會 112 年大專生專題研究計畫補助 (NSTC 112-2813-C-005)
-
獲科技部大專學生研究創作獎
-
中華民國發明專利 I 866703
-
榮獲全國大專校院智慧創新暨跨域整合創作競賽 - 第3名 & 跨域整合特別獎(獎金4萬)
-
榮獲國立中興大學機械設計與製作專題競賽 - 第2名(獎金1.5萬)